Navigation auf uzh.ch
Navigation auf uzh.ch

1996 gewann IBMs «Deep Blue» gegen Gary Kasparov im Schach, 2016 schlug Googles AlphaGo den damals stärksten Spieler Lee Sedol in Go, einem viel komplexeren Spiel. Diese Wettkämpfe, bei denen sich Maschinen gegen menschliche Champions durchsetzen konnten, markieren wichtige Meilensteine in der Geschichte der künstlichen Intelligenz. Nun hat eine Gruppe von Forschern der Universität Zürich und von Intel eine neue Wegmarke gesetzt: mit dem ersten autonomen System, das in der Lage ist, menschliche Champions im Drohnenrennen zu schlagen.
Das KI-System namens «Swift» gewann mehrere Rennen gegen drei Weltklasse-Champions im First-Person-View-Drohnenrennen. Dabei steuern Piloten den Quadcopter über ein Headset, das mit einer Onboard-Kamera verbunden ist und erreichen so Geschwindigkeiten von über 100 km/h.
Physische Sportarten sind für die KI eine grössere Herausforderung, weil sie weniger vorhersehbar sind als Brett- oder Videospiele. «Wir haben kein perfektes Wissen über Drohne und Umgebungsmodelle. Die KI muss sie in Interaktion mit der physischen Welt einstudieren», sagt Davide Scaramuzza, Leiter der Robotik- und Wahrnehmungsgruppe an der Universität Zürich.
Bis vor kurzem brauchten autonome Drohnen doppelt so lange wie die von Menschen gesteuerten, um eine Rennstrecke zu durchfliegen, ausser sie verliessen sich auf ein externes Positionsbestimmungssystem, um die Flugbahn genau zu kontrollieren. Swift hingegen reagiert in Echtzeit auf die Daten, die von einer Onboard-Kamera gesammelt werden. Die integrierte Trägheitsmesseinheit misst Beschleunigung und Geschwindigkeit, während ein künstliches neuronales Netz die Kameradaten nutzt, um die Drohne im Raum zu lokalisieren und die Tore entlang der Rennstrecke zu erkennen. Diese Informationen werden an eine Steuereinheit weitergeleitet, die ebenfalls auf einem tiefen neuronalen Netz basiert. Sie wählt die beste Aktion aus, um die Strecke so schnell wie möglich zu beenden.
Swift wurde in einer simulierten Umgebung trainiert, in der sich das System das Fliegen nach Prinzip Trial-and-Error selbst beibrachte, wobei eine Art des maschinellen Lernens, das sogenannte Reinforcement Learning, zum Einsatz kam. Die Simulation half, die Zerstörung von Drohnen in den frühen Phasen des Lernprozesses zu vermeiden. «Um sicherzustellen, dass die Folgen von Aktionen im Simulator denen in der realen Welt so nahe wie möglich kommen, haben wir eine Methode zur Optimierung des Simulators mit realen Daten entwickelt», sagt Elia Kaufmann, Erstautor der Studie. In dieser Phase flog die Drohne autonom dank sehr präziser Positionen, die von einem externen Positionsbestimmungssystem geliefert wurden, und zeichnete gleichzeitig Daten von ihrer Kamera auf. So lernte sie, Fehler, die sie bei der Interpretation der Daten von den eingebauten Sensoren machte, selbst zu korrigieren.
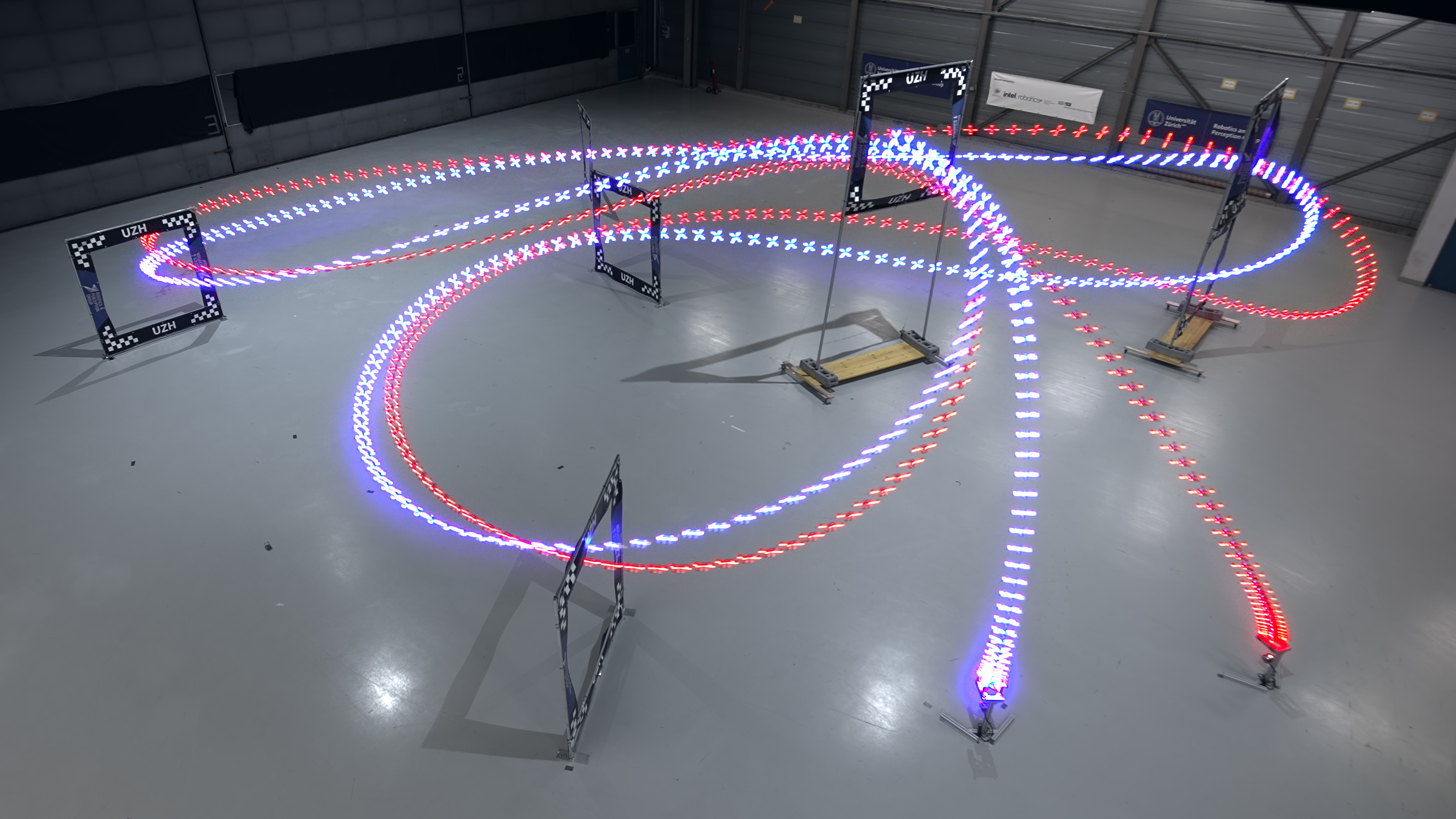
Nach einem Monat simulierter Flugzeit, was auf dem Desktop-PC weniger als einer Stunde entspricht, war Swift bereit, seine menschlichen Konkurrenten herauszufordern: den Drone Racing League Champion 2019 Alex Vanover, den MultiGP Drone Racing Champion 2019 Thomas Bitmatta und den dreifachen Schweizer Meister Marvin Schaepper. Die Rennen fanden zwischen dem 5. und 13. Juni 2022 auf einer eigens dafür gebauten Strecke in einem Hangar des Flughafens Dübendorf bei Zürich statt. Die Strecke umfasste eine Fläche von 25 mal 25 Metern mit sieben quadratischen Toren, die in der richtigen Reihenfolge passiert werden mussten, um eine Runde zu absolvieren. Dazu gehörten auch anspruchsvolle Manöver wie ein Split-S, eine akrobatische Übung, bei der die Drohne halb gerollt wird und bei voller Geschwindigkeit einen absteigenden Halblooping vollführt.
Insgesamt schaffte Swift die schnellste Runde, mit einer halben Sekunde Vorsprung vor der Bestzeit eines menschlichen Piloten. Letztere erwiesen sich allerdings als anpassungsfähiger als die autonome Drohne, die versagte, wenn die Bedingungen anders waren als diejenigen, für die sie trainiert worden war – wenn es zum Beispiel zu hell war im Raum.
Laut Scaramuzza ist es nicht nur für Drohnenrennen wichtig, die Grenzen des autonomen Fliegens zu erweitern. «Drohnen haben eine begrenzte Batteriekapazität; sie brauchen den Grossteil ihrer Energie, um in der Luft zu bleiben. Wenn wir schneller fliegen, erhöhen wir ihren Nutzen. Bei Anwendungen wie der Überwachung von Wäldern oder der Erforschung des Weltraums ist dies wichtig, um grosse Flächen in kurzer Zeit zu erfassen. In der Filmindustrie könnten schnelle autonome Drohnen für die Aufnahme von Actionszenen eingesetzt werden. Nicht zuletzt kann eine hohe Fluggeschwindigkeit einen entscheidenden Unterschied in Rettungsaktionen machen – etwa bei Drohnen, die in ein brennendes Gebäude geschickt werden.
Elia Kaufmann, Leonard Bauersfeld, Antonio Loquercio, Matthias Müller, Vladlen Koltun, Davide Scaramuzza: Champion-Level Drone Racing using Deep Reinforcement Learning. Nature. 31 August 2023. DOI: 10.1038/s41586-023-06419-4