Navigation auf uzh.ch
Navigation auf uzh.ch

Drohnen sind nicht besonders gut darin, Hindernissen auszuweichen – vor allem, wenn sie schnell unterwegs sind. Obwohl viele Flugroboter Kameras haben, die Hindernisse erkennen, dauert es normalerweise 20 bis 40 Millisekunden, bis die Drohne reagiert. Das klingt zwar schnell, reicht aber nicht, um einem Vogel oder einer anderen Drohne auszuweichen. Das sorgt für Probleme, wenn viele Drohnen gleichzeitig fliegen oder die Umgebung unberechenbar ist.
Deshalb hat die Forschungsgruppe «Robotik und Wahrnehmung» am UZH-Institut für Informatik einen Quadrokopter (Drohne mit vier Propellern) mit speziellen Kameras und Algorithmen ausgerüstet und so die Reaktionszeit auf wenige Millisekunden reduziert – kurz genug, um einem aus geringer Distanz geworfenen Ball auszuweichen.
«Bei Such- und Rettungseinsätzen, etwa nach einem Erdbeben, ist der Zeitfaktor sehr kritisch. Deshalb brauchen wir Drohnen, die so schnell wie möglich navigieren, um mit der begrenzten Lebensdauer ihrer Batterien mehr zu erreichen», sagt Davide Scaramuzza, der sowohl die Zürcher Forschungsgruppe als auch die Rescue Robotics Grand Challenge des Nationalen Forschungsschwerpunkts NFS Robotik leitet. «Schnell navigierende Drohnen habe jedoch auch ein höheres Risiko, mit Hindernissen zu kollidieren, ganz besonders, wenn diese sich bewegen. Wir haben erkannt, dass ein neuartiger Kameratyp, eine sogenannte Ereigniskamera, perfekt für solche Anwendungen geeignet ist.»
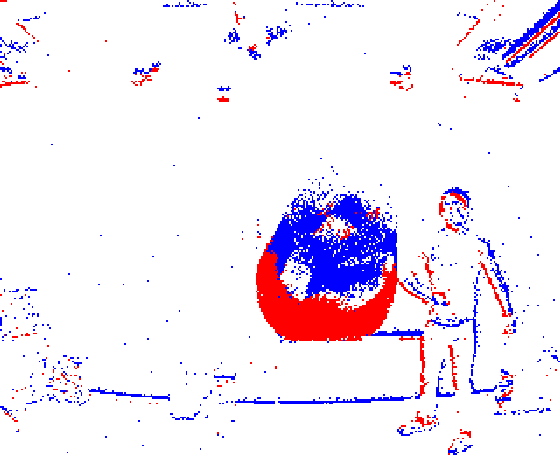
Herkömmliche Videokameras, etwa im Smartphone, machen regelmässig Schnappschüsse der gesamten Szenerie, indem sie gleichzeitig alle Pixel belichten. Ein bewegtes Objekt wird dabei jedoch erst dann erkannt, wenn alle Pixel analysiert sind. Ereigniskameras dagegen verfügen über intelligente, unabhängig voneinander arbeitende Pixel: Nur die Pixel, die eine Veränderung der Lichtintensität detektieren, senden sofort Informationen aus, die anderen bleiben stumm. Dies beschleunigt die Verarbeitung erheblich.
Da Ereigniskameras eine neue Erfindung sind, mussten die Forschenden für deren Einsatz in Drohnen eigene Algorithmen entwickeln. Diese sammeln alle von der Kamera aufgezeichneten Ereignisse über eine sehr kurze Zeitspanne und ziehen davon den Effekt der Eigenbewegung der Drohne ab. Das Signal, das dann übrig bleibt, stammt wahrscheinlich von einem sich bewegenden Objekt.
Zunächst testete das Team das System ohne Drohne, indem sie Gegenstände unterschiedlicher Form und Grösse in Richtung Kamera warfen. Der Algorithmus detektierte die Objekte mit einer Erfolgsrate zwischen 81 und 97 Prozent und brauchte dafür nur 3.5 Millisekunden. Dann bauten sie die Kameras in eine Drohne ein und bewarfen sie im Flug mit Gegenständen, sowohl drinnen wie draussen. In über 90 Prozent der Fälle gelang es der Drohne auszuweichen – sogar wenn ein Ball aus einer Entfernung von nur 3 Metern mit 10 Metern pro Sekunde auf sie zukam.
Dies zeigt laut Scaramuzza, dass Ereigniskameras die Navigationsgeschwindigkeit von Drohnen verzehnfachen können, was die Einsatzmöglichkeiten ausweitet: «Eines Tages werden Drohnen vielfältig eingesetzt werden, etwa für Warenlieferungen, den Personentransport, Luftaufnahmen und natürlich für Such- und Rettungsaktionen. Aber die Fähigkeit von Robotern, auf sie zukommende Hindernisse zuverlässig zu erkennen, spielt auch in anderen Bereichen eine entscheidende Rolle, beispielsweise in der Automobilindustrie, im Bergbau und bei der Ferninspektion mit Robotern.»
In Zukunft möchten die Forschenden das System mit einem noch agileren Quadrokopter testen. «Unser Ziel ist eine autonome Drohne, die genauso gut navigiert wie ein menschlicher Drohnenpilot», sagt der Doktorand und Erstautor der Studie Davide Falanga. «Wenn autonome Drohnen genauso zuverlässig wie menschliche Piloten navigieren, können wir sie auch für Missionen einsetzen, die sich ausserhalb der Sichtlinie oder der Reichweite der Fernsteuerung befinden.»
Die Arbeiten wurden vom Schweizerischen Nationalfonds über den Nationalen Forschungsschwerpunkt Robotik (NFS) finanziert.
Davide Falanga, Kevin Kleber, Davide Scaramuzza, Dynamic Obstacle Avoidance for Quadrotors with Event Cameras. Science Robotics. March 18, 2020. DOI: 10.1126/scirobotics.aaz9712
Video auf Youtube: https://youtu.be/BzykucxFddI